Robotics
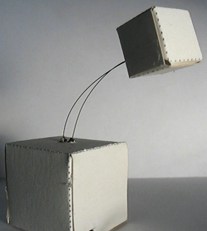
Like many, I got involved with robotics when hobbyist platforms like the MIT Handyboard, and later the Arduino, made prototyping electronics much easier (though see my early experiment with a robot marionette). We’ve built and experimented with several robot construction kits, including roBlocks (commercialized as Cubelets); we’ve developed techniques for making DIY paper robots and adding sensor and actuators to low-cost materials for various purposes, and, in the vein of programmable matter, we’ve looked into building self-configuring robots and speculated on how people might interact with them.
Algo.Rhythm
2012 A tangible computational drum kit with programmable behaviors.
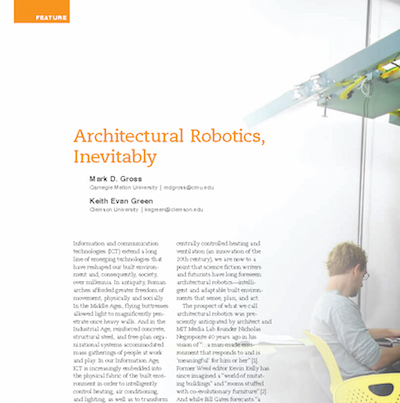
Architectural Robotics
2012 ACM Interactions article on the inevitable embedding of robotics in built environments.

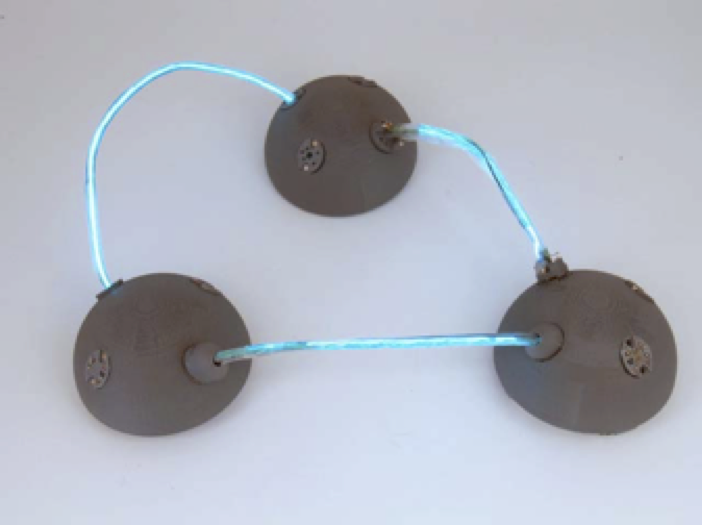
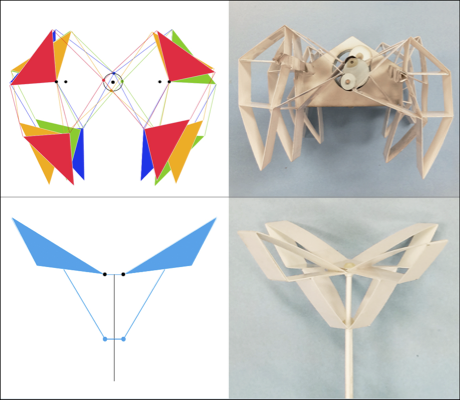
Choreobots
2012 Internally illuminated modular forms that physically deform in response to changes in ambient sound.

Crafting Mechatronic Percussion
2015 Cardboard mechanical components and a custom printed circuit board to build computational percussive instruments with everyday materials.
Cube Robots
2004, 2009 We describe movement primitives for both orthogonal and convex corner transitions with prismatic cube modules.
Cube-In
2015 A kit to learn fundamental physical computing concepts.

Easigami
2009 A reconfigurable system of thin flat polygon pieces connected by electronically instrumented hinges.

Giffi: Gift For Future Inventors
2012 A computationally enhanced construction kit enables children to build kinetic forms through purposeful play and discovery.
Graphmaster
2009 A computationally enhanced construction kit to elucidate fundamentals of graph theory and to provide a platform for experimenting with graphs.

Human Hive
2009 Participants to join a “swarm” to construct hive-like structures from cardboard building blocks using pre-defined rulesets.
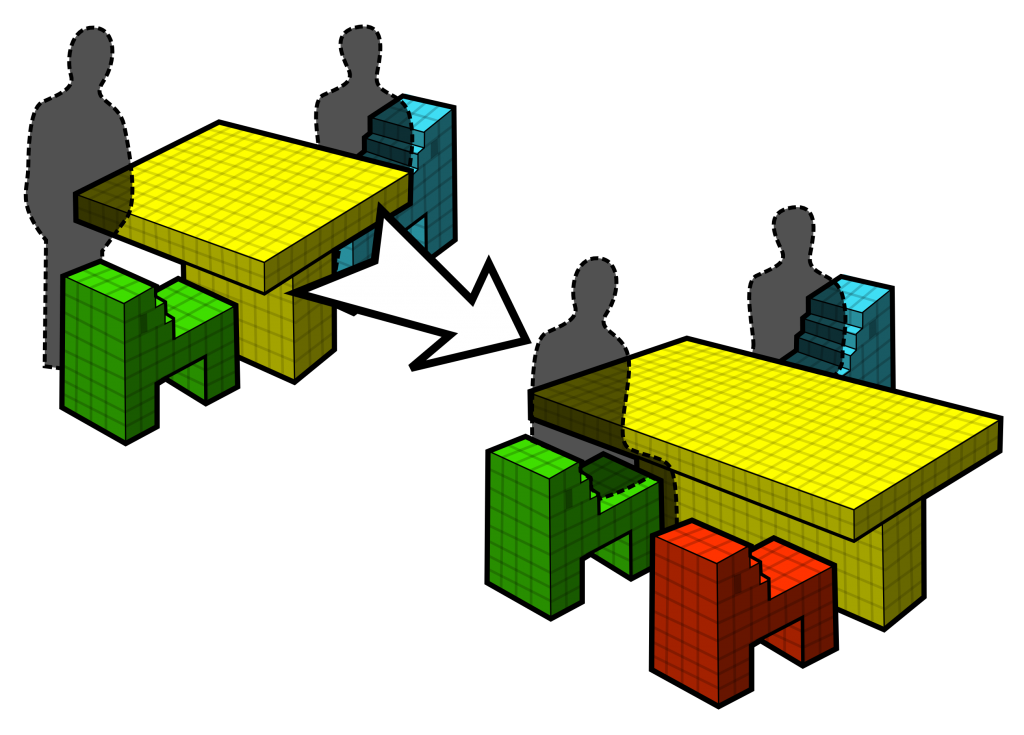
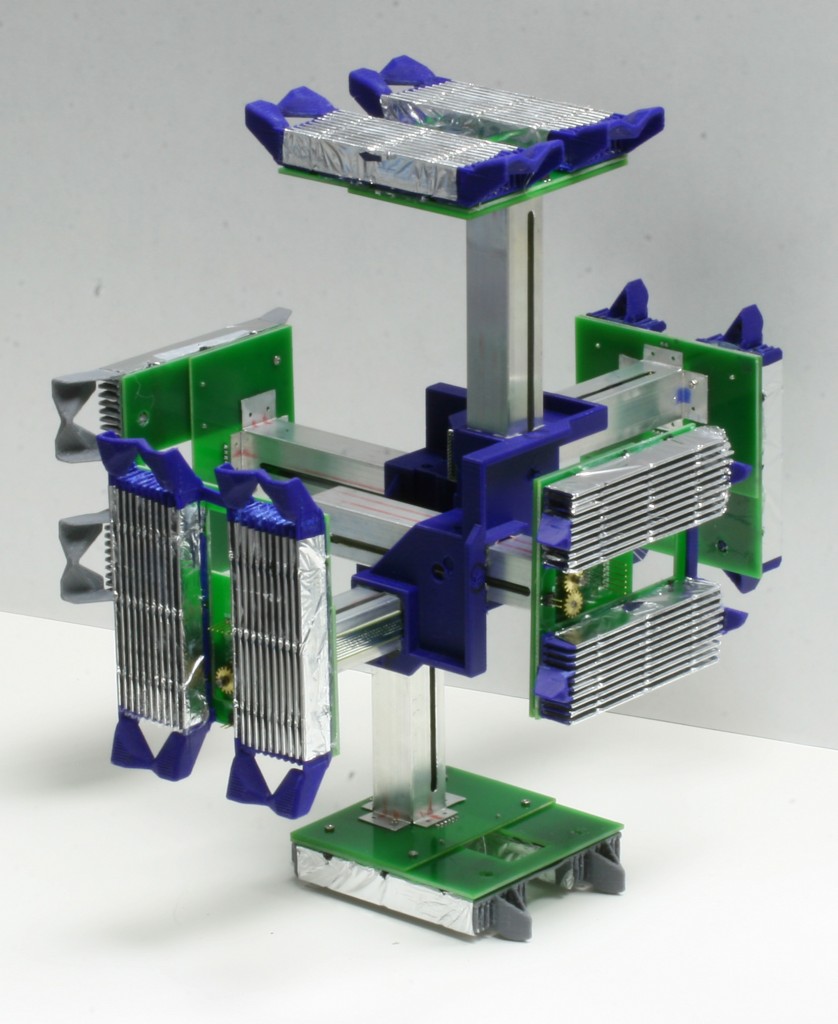
Hyperforms: Self-Reconfiguring Materials
2011 Design of, and interaction with, programmable matter.
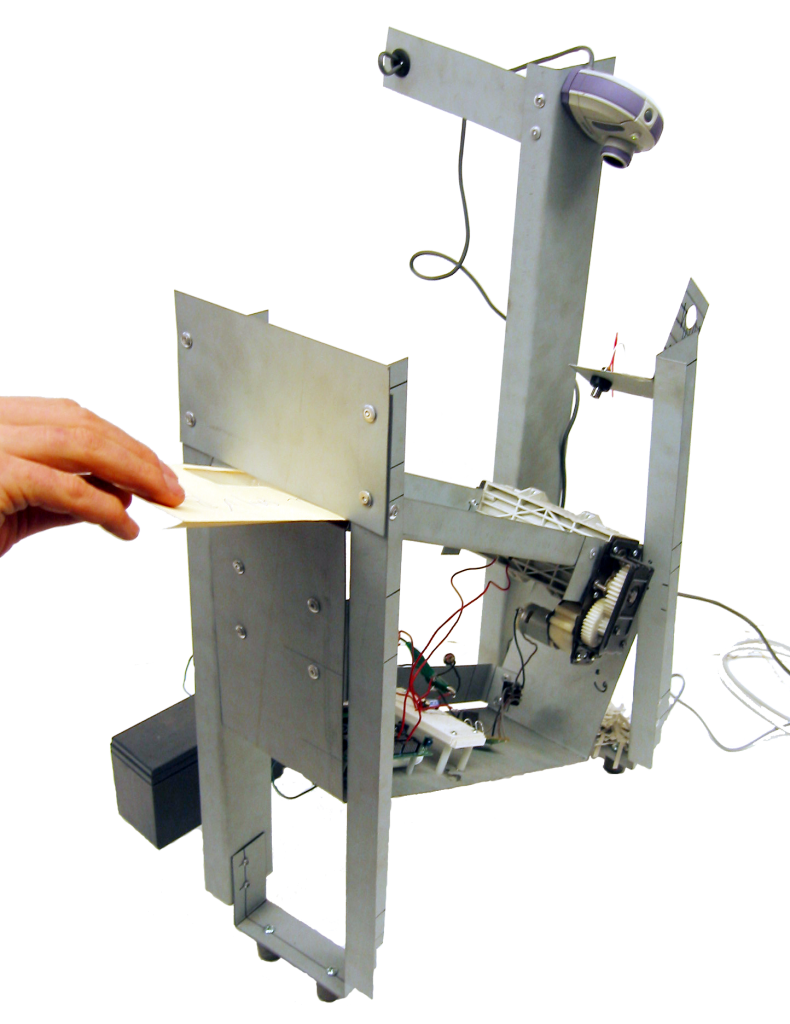
Junk Mail to Spam Converter
2004 Scan, mail, and shred your junk mail.
Kitsch Instrument
2015 Modular tangible user interface system for creating music with everyday objects.
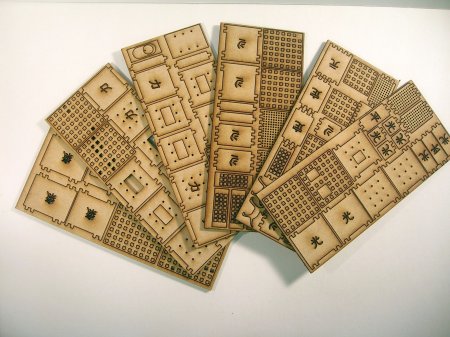
Paper Mechatronics
2015 A novel interdisciplinary design medium enabled by recent advances in craft technologies.
Paper Robots
2010 Small paper interactive objects use shape-memory wire for actuation, gold leaf printed circuits, embedded microchips for control, and paper shells for form and structure.
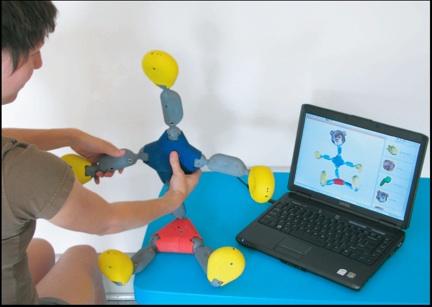
Posey & Escape Machine
2008, 2009 A physical construction kit instrumented to capture assembly and configuration information and convey it to a host computer.

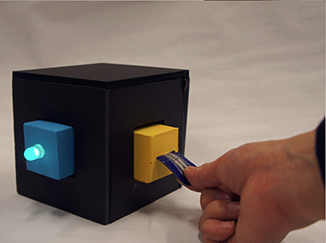
roBlocks / Cubelets
2006-2014 A tangible concurrent programming environment encapsulates sensory, kinetic, and computational behavior in modular building blocks that snap together to build robots.

Self-Designing Systems
2009 The roBlocks reconfigurable robot construction kit and Erstwhile Agent, an evolutionary design system.

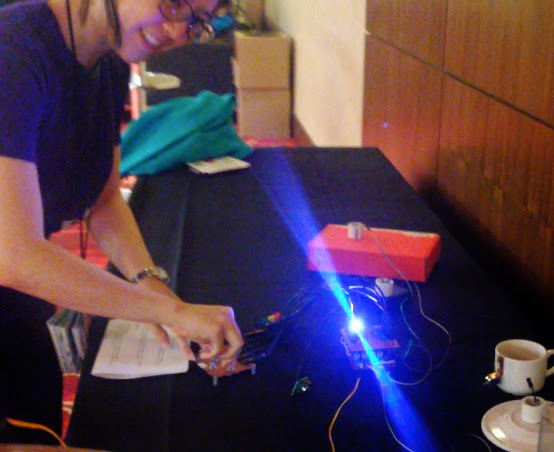
Sensors in the Sky
2011 Large, glowing balloons change color based on attached air quality sensors; a DIY kit includes a printed circuit board, electronic parts and instructions for building the air quality balloons.
Topaoko
2010 An interactive hardboard based embedded circuit construction kit.
Ubiquitous Drums
2010 DIY kit for playing midi-drums on your pants leg.

Wallbots
2010 Autonomous, wall-crawling robots for public expression on a wide range of surfaces and hard-to- reach places.