Collaborators: Michael Weller, Seth Goldstein, Ellen Yi-Luen Do, Brian Kirby, Ben Brown
2009 The prismatic cube style of modular robot is a promising design for realizing self-reconfigurable 3D lattices. Cubic lattices with prismatic transitions simplify many aspects of the hardware and planning control needed for reconfiguration. Despite much research on how cubic modules can coordinate to reconfigure, until now these transitions have not been fully demonstrated in hardware.We describe our movement primitives for both orthogonal and convex corner transitions with prismatic cube modules. We discuss the design of a hardware module capable of performing these transitions, as well as assess the performance of this hardware in an initial demonstration of these transitions.
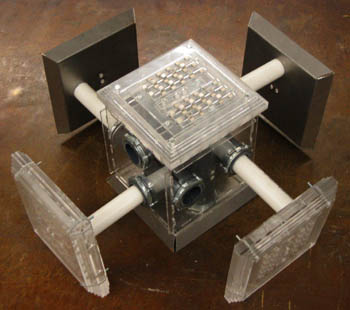
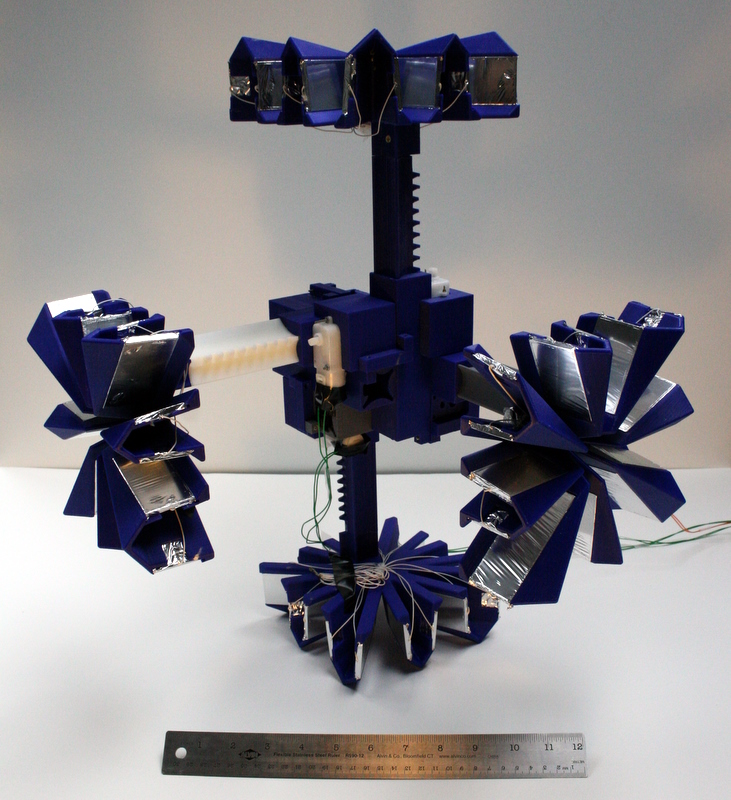
2009 Design of Prismatic Cube Modules for Convex Corner Traversal in 3D, Weller MP, Kirby BT, Brown,HB, Gross MD and Goldstein SC, IEEE Intelligent Robotics and Systems (IROS) St Louis, Oct 11-13, 1490-1495. [pdf]
2004 EspressoCAD, a System to support the design of dynamic structure configurations, M. Weller, E. YL Do, M. Gross, in Proceedings on CD ROM, Generative Computer Aided Design Systems conference, Carnegie Mellon University, Pittsburgh July 11-14 [pdf]