Collaborators: Michael Weller, Seth Copen Goldstein
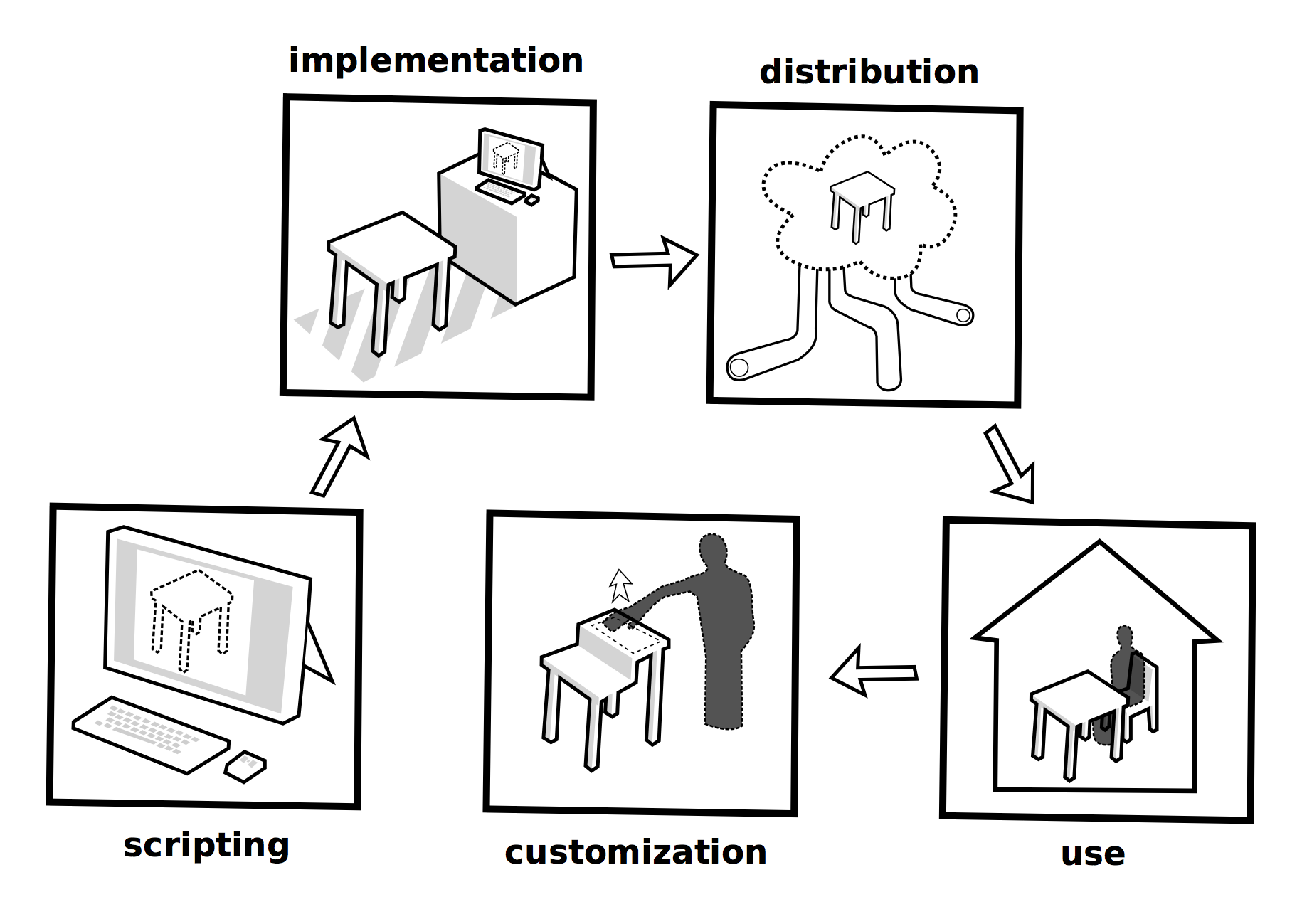
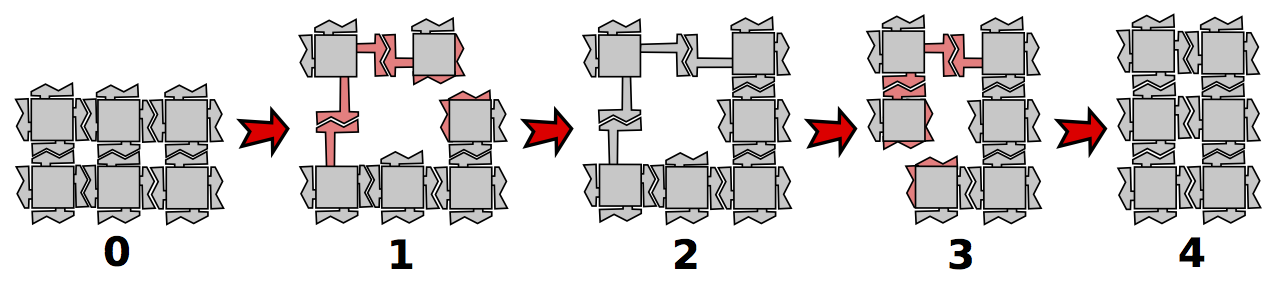
We are on the verge of realizing a new class of material that need not be machined or molded in order to make things. Rather, the material forms and re-forms itself according to software programmed into its component elements. These self-reconfiguring materials are composed of robotic modules that coordinate with each other locally to produce global behaviors. These robotic materials can be used to realize a new class of artifact: a shape that can change over time, i.e., a four-dimensional shape or a hyperform. Hyperforms present several opportunities: objects such as furniture could exhibit dynamic behaviors, could respond to tangible and gestural input, and end-users could customize their form and behavior. To realize these opportunities, the tangible interaction community must begin to consider how we will create and interact with hyperforms. The behaviors that hyperforms can perform will be constrained by the capabilities of the self-reconfiguring materials they are made of. By considering how we will interact with hyperforms, we can inform the design of these systems. In this paper, we discuss the life cycle of a hyperform and the roles designers and end-users play in interacting with hyperforms at these various stages. We consider the interactions such a system could afford as well as how underlying hardware and software affect this interaction. And we consider the extent to which several current hardware systems, including our own prismatic cubes (Weller et al. in Intelligent Robots and Systems. IEEE, 2009), can support the hyperform interactions we envision.
2011 Hyperform Specification: designing and interacting with self-reconfiguring materials, Weller, M, Gross, MD, and Goldstein SC J Personal and Ubiquitous Computing, special issue on Material Computing 15(2): 133-149 [pdf]